伺服电机可使控制速度、位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。伺服电机转子转速受输入信号控制,并能反应,在自动控制系统中,用作执行元件,且具有机电时间常数小、线性度高、始动电压等特性,可把所收到的电信号转换成电机轴上的角位移或角速度输出,使用过程中会出现诸多故障问题,下面中菱科技小编就给大家列举经常会遇到的故障问题。
在进给时出现窜动现象,测速信号不稳定,如编码器有裂纹;接线端子接触不良,如螺钉松动等;当窜动发生在由正方向运动与反方向运动的换向瞬间时,一般是由于进给传动链的反向问隙或伺服驱动增益过大所致;
大多发生在起动加速段或低速进给时,一般是由于进给传动链的润滑状态不良,伺服系统增益低及外加负载过大等因素所致。尤其要注意的是,伺服电动机和滚珠丝杠联接用的联轴器,由于连接松动或联轴器本身的缺陷,如裂纹等,造成滚珠丝杠与伺服电动机的转动不同步,从而使进给运动忽快忽慢;
机床高速运行时,可能产生振动,这时就会产生过流报警。机床振动问题一般属于速度问题,所以应寻找速度环问题;
伺服电机从额定堵转转矩到高速运转时,发现转矩会突然降低,这时因为电动机绕组的散热损坏和机械部分发热引起的。高速时,电动机温升变大,因此,正确使用伺服电机定要对电机的负载进行验算;
当伺服轴运动超过位置允差范围时,伺服驱动器就会出现位置超差报警。主要原因有:系统设定的允差范围小;伺服系统增益设置不当;位置检测装置有污染;进给传动链累计误差过大等;公众号《机械工程文萃》,工程师的加油站!
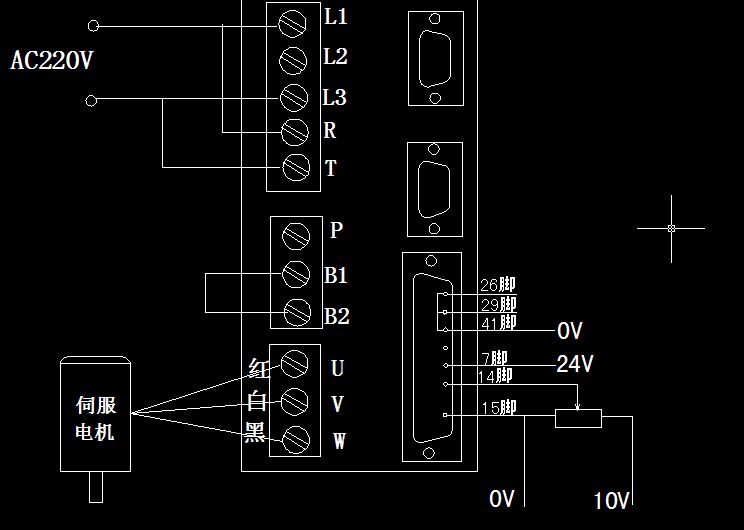
数控系统到伺服驱动器除了联结脉冲+方向信号外,还有使能控制信号,一般为DC+24 V继电器线圈电压。伺服电动机不转,常用诊断方法有:检查数控系统是否有脉冲信号输出;检查使能信号是否接通;通过液晶屏观测系统输入/出状态是否满足进给轴的起动条件;对带电磁制动器的伺服电动机确认制动已经打开;驱动器有故障;伺服电动机有故障;伺服电动机和滚珠丝杠联结联轴节失效或键脱开等。
接线啥的网上都有,直接上代码, IAR , 0~180度 摆动 #include io430.h int main(void) { WDTCTL = WDTPW + WDTHOLD; // Stop WDT DCOCTL = 0; // Select lowest DCOx and MODx settings BCSCTL1 = CALBC1_1MHZ; // Set range DCOCTL = CALDCO_1MHZ; P2DIR = BIT2; // P1.2 output P2SEL = BIT2;
TC642应用电路 (开关模式风扇速度控制器) TC642是一款开关模式风扇速度控制器,用于控制直流无刷风扇的速度。器件采用脉宽调制技术(PWM) 实现风扇速度与温度的正比关系。通过在VIN 输入引脚连接一个热敏电阻( 或其它电压输出温度传感器),可提供所需的1.25V 至2.65V 典型风扇的控制电压,和0% 至100%的PWM占空比。通过VMIN输入端的简单电阻分压器可设定风扇的最低转速。在上电、关断模式恢复以及瞬态故障后重启动时,片内集成的启动定时器可确保风扇电机可靠启动。在 VMIN ( 引脚3) 施加一个逻辑低电平可使风扇进入关断模式。 TC642 中采用了 Microchip Technology 的F
器) /
1 概述 IC设计者力求在越来越小的封装里放入更多高速运行的晶体管,但这必将导致发热。为了把这些高功率IC放进更小的封装内,就必须有效解决热管理问题。在很多应用中使用风扇来降温,但风扇会带来机械故障,增加功耗和噪声。因此,应当对风扇速度进行监测和控制以解决这些问题,从而使风扇工作更可靠,功耗和噪声更低。 由于直流无刷风扇易用、可靠,因此是大部分电子产品的首选方案。它是一个两端器件,加上直流电压即可工作。其直流电压电压有5V,12V,24V和48V,目前选和的12V风扇较多。随着12V电源的减少,5V风扇的用量将会增加。电信领域一般使用48V风扇。直流无刷风扇的换向整流是在风扇内部通过电子方式控制的,老式直流风扇使用机械工刷
电机在如今生活中的应用是非常广泛的,这些电机的使用为人们的生活提供了更多的方便,当然在电机应用过程中也要注意型号的选择以及正确的操作和使用,这样才可以保证我们更好的使用设备,另外电机原理的了解也可以帮助我们深度的认识设备,下面就让我们一起来看下伺服电机工作原理吧。 伺服电机工作原理 伺服电机如今被用于生活中的方方面面,那么伺服电机工作原理是什么呢?伺服电机是利用电压信号来控制转矩和转速的,这也让伺服电机有着更高的精准度,在操作过程中能够轻松的利用电压来控制转速的输出,从而满足不同情况下的转速需求,保证了动力的完美利用,确保了机械应用效率更高。 伺服电机优势 目前在生活中很多场所下都会选用伺服电机,这与伺服电机的突出性能
是如何工作的?其有何特点? /
伺服电机编码器替代技巧 从结构上讲,伺服系统分为三部分:伺服电机、编码器、驱动器。伺服电机的精度取决于编码器,故障也常见于这三方面。由于技术、利益等关系,各厂家所生产的配件不可代替,而进口配件的渠道不很畅通,造成维修上很大困难。我们可以通过对其测量,分析研究工作原理,尝试采用替换的方法进行维修。例如,手头上有一个15芯电缆的编码器,尝试替代日本安川9芯电缆的编码器,该编码器分辨率为1024,6极,配套在安川公司生产的型号为SGMP-06AFTF22的交流伺服电机上,其原理如图1所示。即编码器的接线除 a正、a负、b正、b负、z正、z负,加上正负电源和屏蔽共9根线根线根线编码器无法替代使
编码器替代技巧 /
步进电机和伺服电机是两种常见的电机类型,它们的应用场景和控制方式不同,下面是它们的区别和选型方法: 步进电机是一种开环控制电机,控制信号为脉冲信号,通过控制脉冲数量和频率来控制电机的位置和运动。步进电机具有简单的控制方式、低成本和较高的精度,但通常不能提供高速运动和高负载扭矩。 伺服电机是一种闭环控制电机,控制信号为模拟信号或数字信号,通过反馈机制(例如编码器)实现位置和速度的闭环控制。伺服电机具有更高的速度、更大的输出扭矩和更高的控制精度,但通常成本更高,控制系统也更为复杂。 选型方法选型步进电机和伺服电机时需要考虑以下几个因素: 控制精度要求:如果应用需要较高的控制精度,则应选择伺服电机。如果要求不
伺服电机控制器的类型包括降压起动器、调速驱动器、智能控制器等三种分类,另外控制方面主要以方波控制、正弦波控制等两种方式,那么下面就详细介绍一下相关内容。 一、伺服电机控制器的各项类型 1、降压起动器 可以用二个或是多个接触器,在电动机启动时提供较低的电压。使用自耦变压器或串联电感,可以在电动机启动时在端子输入较低的电压,减小启动转矩及突入电流,在电动机的速度到达额定转速的一定比例时,起动器自动将电动机端子切换到正常电压输入。因为自耦变压器及串联电感只在启动时有重压的启动电流流过,时间可能只有几秒,因此其额定会比相同电流,连续使用下的额定要小。较低的电压到正常电压的切换可以用时间计时来切换,或是配合电流感测器,当电流开始下降时进
随着各种技术的不断更新,我国的数控系统和伺服驱动器在最近几年也有了较大的发展,现在伺服驱动器在自动化生产设备中经常用到,掌握伺服驱动器参数设置的方法是现代化生产中必备的一个技能。 伺服电机是自动控制装置中被用作执行元件的微特电机,其功能是将电信号转换成转轴的角位移或角速度。 在自动化设备中,经常用到伺服电机,特别是位置控制,大部分品牌的伺服电机都有位置控制功能,通过控制器发出脉冲来控制伺服电机运行,脉冲数对应转的角度,脉冲频率对应速度(与电子齿轮设定有关),当一个新的系统,参数不能工作时,首先设定位置增益,确保电机无噪音情况下,尽量设大些,转动惯量比也非常重要,可通过自学习设定的数来参考,然后设定速度增益和速度积分时间,确
驱动器参数设置的方法与技巧 /
系统设计 (田宇编著) target=_blank
[高精度实验室] ADC系列 10 : 高速模数转换器 (ADC) 基础
罗姆有奖直播报名中!解决电源IC困扰的ROHM先进电源技术Nano系列
艾睿电子技术解决方案展 2024 — 携手共建更智能绿色未来,火热报名中!
Follow me第二季第3期来啦!与得捷一起解锁高性能开发板【EK-RA6M5】超能力!
微电子和软件技术的快速发展正在深刻地改变车载娱乐中控和安全系统设计,重新定义驾驶体验。这一转型的核心是电子驾驶舱(eCockpit),这是 ...
在人工智能、安全和互连不断发展的时代,我们为您准备了FPGA创新的最前沿资讯,助您进一步提升系统设计和开发水平。您可以在莱迪思开发者大 ...
实际案例说明用基于FPGA的原型来测试、验证和确认IP——如何做到鱼与熊掌兼得?本系列文章从数字芯片设计项目技术总监的角度出发,介绍了如 ...
如何实现飞跃至48V电气架构How to Make the Leap to 48V Electrical Architectures即使不考虑从内燃机向电池电动汽车(BEV)的过渡 ...
0 写在前面3D目标检测是自动驾驶非常重要的一个基础任务,其重要性不言而喻。今天笔者为大家推荐一篇3D目标检测方向的最新综述。作者:Xi ...

FPGA/DSP总线与接口数据处理消费电子工业电子汽车电子其他技术存储技术综合资讯论坛电子百科词云:米乐(MILE)-官方首页
本文由:米乐M6,米乐官方网站,米乐登录入口提供