此外需要花大量的时间进行调试,可能开发出来的性能不尽人意,比如定位不准,速度误差大,驱动电机发热严重等问题,还有可能反反复复设计P****CB
** 幸好有了德国T****rinamic**Motion Control一家在嵌入式运动控制领域的全球领导者,将其可靠、稳定的运动控制算法集成在硬件里面,使客户达到降低成本目的的同时,花最少的时间,最小的工作量开发出可靠,卓越的电机运动控制系统。
** 为了让工程师现实在三天内完成开发伺服系统的目的,Trinamic开发出一款全球首款片载伺服控制系统的芯片****TMC**M1690-MotionCookie™
面对一些欧美进口品牌伺服产品价格比价高,用户自己开发对工程师技能要求比较高,对平台性能要求也比较高的诸多难题,全球嵌入式运动控制领导品牌德国Trinamic推出一款可媲美欧美伺服品牌的低成本芯片级解决方案 - 全球首款伺服片载系统TMCM1690
TMCM1690可以驱动控制三相BLDC、PMSM或单相DC有刷伺服电机。
TMCM1690只需要用户根据自己的电机功率增加外部功率管,便可实现性米乐(MILE)-官方首页能卓越的伺服控制系统。TMCM1690内部集成了从电流环、速度环到位置环的PI算法。
TMCM1690集成了内核,可精确实现力矩/速度/位置控制的FOC算法,以及TMCL/CANopen/EtherCAT 米乐(MILE)-官方首页COE的应用层协议,此外还可支持程序存储,实现脱机运行,带有霍尔/双编码器(Encoder1/Encoder2)/限位输入接口。无需用户做任何底层的代码开发,一颗芯片等同于一款高性能伺服控制系统,满足了即使没有嵌入式开发经验的用户也能实现高性能伺服的开发。
TMCM1690是伺服电机用户降低成本的最佳选择方案,满足用户三天内实现伺服开发。
Trinamic为TMCM1690提供界面丰富,功能强大的操作软件TMCL-IDE,用户只需要通过CAN,RS232RS485连接上电脑打开TMCL-IDE软件就可以对伺服电机的力矩,速度和位置实现精确控制,无需再做任何底层软件开发,直接使用。
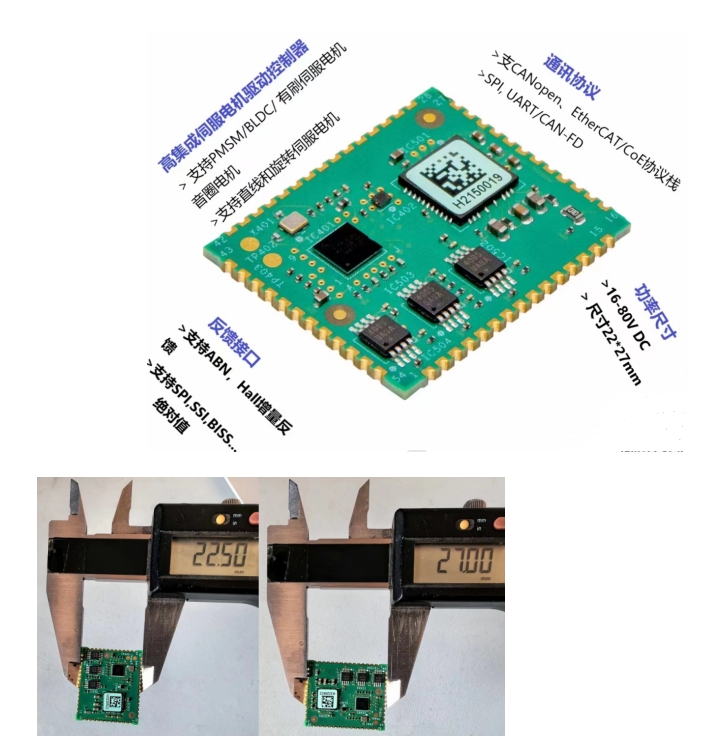

TMCM-1690 支持增量编码器, 数字霍尔编码器, 和 绝 对 值 编 码 器 作 为 位 置 反 馈 。
TMCM1690视频使用教程BLDC、PMSM伺服电机片载模块TMCM1690配置方法支持双编码器反馈直线电机旋转电机绝对值编码器反馈_哔哩哔哩_bilibili
TMCM1690视频介绍:通讯;支持三相BLDC、PMSM直流有刷直线伺服和音圈电机;霍尔/ABN/SPI编码器反馈_哔哩哔哩_bilibili
的应用场景,中断响应速度低至ns级,而非常高负载情况下ThreadX任务抖动依然可
稳定、功能丰富等特点,为现代工业应用提供了高效、可靠的解决方案。如需更多
,技术指标达到国内一流水平:最小周期为125us,抖动小于80ns,最大可以同步接入32个
的解析 /
系统设计 /
算法集成在硬件里面,使客户达到降低成本目的的同时,花最少的时间,最小的工作量
网关在钢铁行业的应用案例 /
网关(JM-ECT-COP) /
如何解决MPU-9250与STM32通讯时,出现HAL_ERROR = 0x01U
【RA-Eco-RA2E1-48PIN-V1.0开发板试用】简介、环境搭建、工程测试
本文由:米乐M6,米乐官方网站,米乐登录入口提供